



I. Introduction▲
I-A. Notion d'algorithme▲
Définition 1.1. Un algorithme est une procédure de calcul bien définie qui prend en entrée un ensemble de valeurs et qui délivre en sortie un ensemble de valeurs.
Exemple 1.1
Problème : trier une suite de nombres entiers dans l'ordre croissant.
Entrée : suite de n nombres entiers (kitxmlcodeinlinelatexdvpa_1, a_2 \dots\ a_nfinkitxmlcodeinlinelatexdvp)
Sortie : une permutation de la suite donnée en entrée (kitxmlcodeinlinelatexdvpa'_1, a'_2 \dots\ a'_nfinkitxmlcodeinlinelatexdvp) telle que kitxmlcodeinlinelatexdvpa'_1\leq a'_2\leq \dots \leq a'_nfinkitxmlcodeinlinelatexdvp. À partir de la suite (6,9,2,4), un algorithme de tri fournira le résultat (2,4,6,9).
Définition 1.2. Une valeur particulière de l'ensemble des valeurs données en entrée est appelée instance du problème.
Exemple 1.1 (suite)
La valeur (6,9,2,4) est une instance du problème.
Définition 1.3. Un algorithme est correct, si pour toute instance du problème il se termine et produit une sortie correcte.
Les algorithmes peuvent être spécifiés en langage humain ou tout langage informatique. Dans ce qui suit, nous utiliserons un langage proche du langage naturel. Nous donnerons une implémentation en Python (voir cours MISMI MIS 102).
Définition 1.4. Une heuristique est une procédure de calcul correcte pour certaines instances du problème (c'est-à-dire se termine ou produit une sortie correcte).
Ce cours n'aborde pas les heuristiques.
Pour qu'un algorithme puisse être décrit et s'effectue, les données d'entrées doivent être organisées.
Définition 1.5. Une structure de données est un moyen de stocker et d'organiser des données pour faciliter leur stockage, leur utilisation et leur modification.
De nombreux problèmes nécessitent des algorithmes :
- bio-informatique ;
- moteur de recherche sur Internet ;
- commerce électronique ;
- affectation de tâches.
Définition 1.6. L'efficacité d'un algorithme est mesurée par son coût (complexité) en temps et en mémoire.
Un problème NP-complet est un problème pour lequel on ne connaît pas d'algorithme correct efficace, c'est-à-dire réalisable en temps et en mémoire. Le problème le plus célèbre est le problème du voyageur de commerce.
L'ensemble des problèmes NP-complets ont les propriétés suivantes :
- si on trouve un algorithme efficace pour un problème NP complet alors il existe des algorithmes efficaces pour tous ;
- personne n'a jamais trouvé un algorithme efficace pour un problème NP-complet ;
- personne n'a jamais prouvé qu'il ne peut pas exister d'algorithme efficace pour un problème NP-complet particulier.
I-B. Notion de complexité▲
L'efficacité d'un algorithme est fondamentale pour résoudre effectivement des problèmes.
Exemple1.2.
Supposons que l'on dispose de deux ordinateurs. L'ordinateur A est capable d'effectuer 109 instructions par seconde. L'ordinateur B est capable d'effectuer 107 instructions par seconde. Considérons un même problème (de tri par exemple) dont la taille des données d'entrées est n. Pour l'ordinateur A, on utilise un algorithme qui réalise 2n2 instructions. Pour l'ordinateur B, on utilise un algorithme qui réalise kitxmlcodeinlinelatexdvp50n\log(n)finkitxmlcodeinlinelatexdvpinstructions. Pour traiter une entrée de taille 106 : l'ordinateur A prendra 2000 s et l'ordinateur B prendra 100 s. Ainsi, même si la machine B est médiocre, elle résoudra le problème 20 fois plus vite que l'ordinateur A.
Définition 1.1. La complexité d'un algorithme est :
- en temps, le nombre d'opérations élémentaires effectuées pour traiter une donnée de taille n ;
- en mémoire, l'espace mémoire nécessaire pour traiter une donnée de taille n.
Dans ce cours, nous considérerons que la complexité des instructions élémentaires les plus courantes sur un ordinateur ont un temps d'exécution que l'on considérera dans ce cours comme constant égal à 1. Les instructions élémentaires sont : addition, multiplication, modulo et partie entière, affectation, instruction de contrôle. Ce qui intéresse fondamentalement l'algorithmique, c'est l'ordre de grandeur (au voisinage de l'infini) de la fonction qui exprime le nombre d'instructions. Les courbes de références sont iciLes courbes « étalon ».
I-C. Langage de description d'algorithmes▲
Il est nécessaire de disposer d'un langage qui soit non lié à l'implémentation. Ceci permet une description plus précise des structures de données ainsi qu'une rédaction de l'algorithme plus souple et plus « lisible ». Le langage EXALGODescription d'algorithme - Langage EXALGO est un exemple de ce qui peut être utilisé et qui sera utilisé dans ce cours. Il est composé de chaînes de caractères alphanumériques, de signes opératoires (+, -, *, /, <, <=, >=, >, <>, ==, =, ou, non, et), de mot-clés réservés, et de signes de ponctuation : ''=, ;, (, ), début, fin, //. Les balises début et fin peuvent être remplacées par { et }.
Python n'utilise pas de marqueurs de fin. Le caractère « : » est le marqueur de début et quand l'indentation cesse Python considère que c'est un marqueur de fin.
II. Codage et structures de contrôle▲
II-A. Définitions▲
Définition 2.1. Un type abstrait est un triplet composé :
- d'un nom ;
- d'un ensemble de valeurs ;
- d'un ensemble d'opérations définies sur ces valeurs.
Les types abstraits de base de l'algorithmique sont :
|
entier, caractère, booléen, réel |
que l'on écrit respectivement en EXALGO
|
entier, car, booléen, réel |
Définition 2.2. Une variable est un triplet composé :
- d'un type (déjà défini) ;
- d'un nom (a priori toute chaîne alphanumérique) ;
- d'une valeur.
On écrit en EXALGO
var NomDeVariable : Type;Type est à prendre pour l'instant dans l'ensemble {entier, car, booléen, réel}.
Définition 2.3. Les Expressions sont constituées à l'aide de variables déjà déclarées, de valeurs, de parenthèses et d'opérateurs du (des) type(s) de variables concernées.
Définition 2.4. L'affectation est l'instruction qui permet de stocker une valeur dans une variable.
On écrit :
NomDeVariable = ExressionDuTypeDeLaVariable;Toute variable doit être déclarée et recevoir une valeur initiale.
II-B. Types de base▲
II-B-1. Booléens▲
Une variable de type booléen prend comme valeur VRAI ou FAUX. Les opérations usuelles sont ET, OU et NON qui sont données dans les tables qui suivent :
II-B-2. Entiers▲
Une variable de type entier peut prendre comme valeur l'ensemble des nombres entiers signés. Les opérations associées sont les opérations usuelles +,-,*,/.
II-B-3. Réels▲
Une variable de type réel peut prendre comme valeur l'ensemble des nombres réels. Les opérations associées sont les opérations usuelles +,-,*,/.
II-B-4. Caractères▲
Une variable de type car peut prendre comme valeur l'ensemble des caractères imprimables. On notera les valeurs entre guillemets. On considère souvent que les caractères sont ordonnés dans l'ordre alphabétique.
II-B-5. Attention▲
Les valeurs :
- "1" qui est un caractère ;
- 1 qui est un entier ;
- 1. qui est un réel ;
sont différentes et ne seront pas codées de la même manière dans la mémoire de la machine.
II-B-6. Comparaison▲
Les opérateurs <, ≤, ==, !=, >, ≥ permettent de comparer les valeurs de type entier, réel et caractère. Le résultat de cette comparaison est une valeur booléenne.
II-C. Structures de contrôle▲
Il y a trois structures principales de contrôle qui permettent de construire des algorithmes.
- Bloc d'instructions :
début
instruction1
instruction2
..........
fin-
Alternative :
-
Alternative simple :
Traduction PythonCacher/Afficher le codeSélectionnezSélectionnezsiExpressionBooléennealorsBlocInstructions1sinonBlocInstructions2finsi;
-
-
Alternative multiple (traduction Python) :
Traduction PythonCacher/Afficher le codeSélectionnezSélectionnezselon quecascas1 : BlocInstructions1cascas2 : BlocInstructions2 ..........autrement: BlocInstructionfinselonque -
Répétition
L'instruction exit permet d'arrêter la répétition.-
Le bloc d'instructions peut ne pas être exécuté :
Traduction PythonCacher/Afficher le codeSélectionnezSélectionneztant queExpressionBooléennefaireBlocInstructionsfintantque;
-
-
Le bloc d'instructions peut ne pas être exécuté et il y a une variable indicatrice :
Traduction PythonCacher/Afficher le codeSélectionnezSélectionnezpourVariableIndicatriceallant deValeurInitialeàValeurFinalepar pas deValeurPasfaireBlocInstructionsfinpour; - Le bloc d'instructions est exécuté au moins une fois (ne se traduit pas directement en Python) :
répéter
BlocInstructions
jusqu'à ExpressionBooléenne finrépéter;II-D. Fonctions▲
Une fonction est une section d'algorithme qui a un objectif bien défini et un nom. En général, elle communique avec l'extérieur par le biais de paramètres typés. Elle possède des variables locales qui ne sont pas visibles à l'extérieur de la fonction. Ces variables peuvent être des fonctions. Une fonction retourne une valeur par l'instruction simple retourne(Expression). L'expression peut être :
- vide, tout s'est bien passé, mais il n'y a pas de résultat à retourner : retourne() ;
- sans résultat, il est impossible de retourner un résultat suite à un cas de figure de l'instance : retourne(
NUL).
II-D-1. Syntaxe▲
-
Écriture de la fonction :
SélectionnezfonctionNomDeFonction (ListeParamètres) :TypeRésultat;// déclarations des variables ou fonctions locales autres que les paramètresdébut// partie instruction qui contient l'appel à retournefinfinFonction -
Liste des paramètres
Les paramètres sont passés :-
par référence
ref, on écrit :SélectionnezrefListeVariable NomDeTypela fonction travaille directement dans la variable passée en paramètre ;
-
-
par valeur
val, on écrit :SélectionnezvalListeVariable:NomDeTypela fonction travaille sur une copie de la variable passée en paramètre.
- Le type du résultat est vide si la fonction ne renvoie pas de résultat.
II-D-2. Utilisation▲
Une fonction s'utilise en écrivant :
NomDeFonction(ListeInstanceParamètres)- dans le calcul d'une expression, si la fonction retourne une valeur ;
- comme une instruction simple, si elle ne retourne pas de valeur.
II-D-3. Exemple▲
fonction exemple(val n :entier;ref m : entier) :vide;
début
n = 5;
m = 7;
fin
finFonctionSupposons que l'on ait la séquence suivante :
var p,q :entier;
début
p = 1;
q = 2;
exemple(p,q);
finAprès exécution p contiendra 1 et q contiendra 7 (Animation ici).
III. Description d'algorithme - Langage EXALGO▲
EXALGO permet de fixer les quelques règles élémentaires permettant d'écrire des algorithmes en s'affranchissant l'implémentation.
III-A. Généralités▲
Le langage EXALGO est composé de chaînes de caractères alphanumériques, de signes opératoires, de mot-clés réservés, et de signes de ponctuation : =, ;,(,), début, fin, //. Les marqueurs de fin, début et fin peuvent être remplacés par { et } lorsqu'il y a encombrement.
III-B. Type▲
- Types prédéfinis : entier, car, booléen, réel ;
type NomDeType = TypePrédéfini;typeNomDeType = tableau 1..limite deTypePrédéfini;III-C. Variables▲
var NomDeVariable: TypePrédéfini;III-D. Expressions▲
Constituées à l'aide de variables déjà déclarées, de parenthèses et d'opérateurs du (des) type(s) des variables concernées.
III-E. Instructions simples▲
-
affectation :
SélectionnezNomDeVariable = ExressionDuTypeDeLavariable; - sortie de calcul : exit, retourne().
III-F. Structure de contrôle▲
-
Bloc d'instruction :
Bloc d'instructionSélectionnezInstruction1 instruction2 ............. -
Alternative :
SélectionnezsiExpressionBooléennealorsBlocInstruction1sinonBlocInstruction2finsi; -
Alternative multiple :
Sélectionnezselon quecascas1 : BlocInstruction1cascas2 : BlocInstruction2 .............autrement: BlocInstructionfinselonque -
Répétition : exit permet d'arrêter la répétition
-
le bloc d'instruction peut ne pas être exécuté
Sélectionneztant queExpressionBooléennefaireBlocInstructionfintantque;
-
-
le bloc d'instruction peut ne pas être exécuté et il y a une variable indicatrice
SélectionnezpourVariableIndicatriceallant deValeurInitialeàValeurFinalepar pas deValeurPasfaireBlocInstructionfinpour; - le bloc d'instruction est exécuté au moins une fois
répéter
BlocInstruction
jusqu'à ExpressionBooléenne finrépéter;III-G. Fonctions▲
Une fonction retourne une valeur par l'instruction simple (retourne(Expression)). Une fonction s'utilise dans le calcul d'une expression ou comme instruction simple.
-
Écriture de la fonction :
SélectionnezfonctionNomDeFonction (ListeParamètres):TypeRésultat;// déclarations des variables locales autres que les paramètresdébut// partie instruction qui contient l'appel à retourne()finfinFonction -
Liste des paramètres .
Les paramètres sont passés :-
par référence
ref, on écrit :SélectionnezrefListeVariable:NomDeType
-
-
par valeur
val, on écrit :SélectionnezvalListeVariable:NomDeType - Le type du résultat est
videsi la fonction ne renvoie pas de résultat.
III-H. Types▲
III-H-1. Type structuré▲
Un type structuré est constitué à partir de types de base ou d'autres types déclarés.
type NomDeType: structure
champ1:NomDeType1
champ2:NomDeType2
…
finstructureAprès la déclaration :
var E:NomDeTypeEnregistrementon accède aux différents champs par le nom de la variable suivi d'un point suivi du nom de champ (E.champ1).
III-H-2. Type pointeur▲
Si O est un objet de type T, on accède à l'objet par O^. Si on déclare :
var P:^NomDeTypealors on peut obtenir un objet accessible par allouer(P). Lorsqu'on n'utilise plus l'objet, il faut libérer l'espace qu'il utilise par desallouer(P).
IV. Structures de données▲
IV-A. Définition▲
Définition 3.1. Une séquence sur un ensemble E est une suite d'éléments (e1,e2,…en) d'éléments de E.
Une séquence peut contenir des éléments identiques de l'ensemble E.
Exemple 3.1 (3,5,8,2,12,6) : est une séquence d'éléments de N, ensemble des entiers naturels. ("a","z","T","A","a") est une séquence sur l'ensemble des caractères imprimables (char).
Il existe plusieurs variantes de séquences suivant les opérations de manipulation autorisées : accès par l'indice de l'élément ou non, accès à la fin de la séquence ou non…
On utilisera en général des noms particuliers dépendant des caractéristiques de la séquence.
Exemple 3.2 : Un vecteur peut être défini par une séquence dans laquelle l'accès aux éléments se fait par son indice et la taille de la séquence dépend de l'espace dans lequel on se trouve. On dit aussi qu'on a un accès direct à l'élément. Dans la plupart des langages de programmation, le vecteur existe sous le nom d'array.
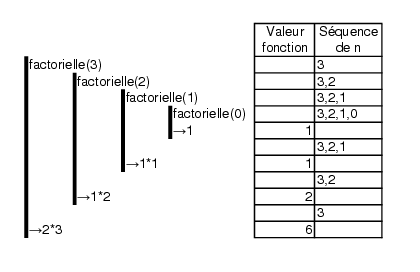
Exemple 3.3 : Soit la procédure calculant la factorielle :
fonction fac(val n :entier) :entier;
début
si n <= 1 alors
retourner(1)
sinon
retourner(n * fac(n-1))
finsi
fin
finfonctionLa séquence des valeurs de n au cours des appels récursifs doit être mémorisée. Supposons l'appel fac(4) alors :
- il y aura appel de fac(
3), la mémorisation de n se fera par la séquence L=(4) ; - il y aura appel de fac(
2), la mémorisation de n se fera par la séquence L=(3,4) ; - il y aura appel de fac(
1), la mémorisation de n se fera par la séquence L=(2,3,4) ; - après exécution de fac(
1), la valeur est supprimée en tête de séquence L=(3,4) ; - après exécution de fac(
2), n prend pour valeur la tête de la séquence et la valeur est supprimée en tête de séquence L=(4) ; - après exécution de fac(
3), n prend pour valeur la tête de la séquence et la valeur est supprimée en tête de séquence L=().
IV-B. Structure▲
Soit kitxmlcodeinlinelatexdvpF_1,\ F_2, \dots,\ F_pfinkitxmlcodeinlinelatexdvp des ensembles.
Définition 3.2. Une structure sur kitxmlcodeinlinelatexdvpF_1 \times F_2 \times \dots \times F_pfinkitxmlcodeinlinelatexdvp est une séquence kitxmlcodeinlinelatexdvp(f_1,\ f_2, \dots,\ f_k)finkitxmlcodeinlinelatexdvp telle que
kitxmlcodeinlinelatexdvp\forall{i}\in [ 1..k ],f_i\in F_ifinkitxmlcodeinlinelatexdvp.
Les structures sont des cas particuliers de séquences. En algorithmique, chaque ensemble kitxmlcodeinlinelatexdvpF_ifinkitxmlcodeinlinelatexdvp peut être un type de base ou une structure. Ce mécanisme permet de définir de nouveaux types plus complexes que les types de base. En EXALGO, on écrit :
nom_du_type = structure
nom_champs_1 :type1;
nom_champs_2 :type2;
…
nom_champs_k :typek;
finstructureCela signifie que lorsqu'une variable est déclarée de ce type, elle référence k variables en même temps. Soit V une variable dont le type est une structure, on désigne un des champs par V. suivi du nom du champ.
Exemple 3.4 : Une date de naissance est un exemple de structure. On peut écrire :
dateDeNaissance = structure
jourDeNaissance: entier;
moisDeNaissance: entier;
annéeDeNaissance: entier;
finstructureOn peut définir une structure composée du sexe et de la date de naissance :
individu = structure
sexe :booléen
date :dateDeNaissance;
finstructure.Soit la déclaration :
var I :individualors I.sexe sera un booléen et I.date.jourDeNaissance sera un entier. Ainsi les instructions suivantes ont un sens :
I.date.jour = 12;
I.sexe = faux;IV-C. Table d'association à clé unique▲
Définition 3.3 : Soit F un ensemble. Une table d'association à clé unique est une séquence d'éléments de kitxmlcodeinlinelatexdvpN \times Ffinkitxmlcodeinlinelatexdvp (N est l'ensemble des entiers naturels), kitxmlcodeinlinelatexdvp( ( c_{1}, f_{1} ),\ ( c_{2}, f_{2} ),\ldots,\ ( c_{k}, f_{k} ) )finkitxmlcodeinlinelatexdvp telle que :
kitxmlcodelatexdvp\forall i,j \in [ 1..k ],i\neq j,c_{i}\neq c_{j}finkitxmlcodelatexdvpLes tables d'association sont un cas particulier de séquences d'éléments structurés. La structure se décrit en EXALGO :
association = structure
cle :entier;
valeur :type_prédéfini;
finstructureExemple 3.5 : Lors de l'activation du compte électronique, l'étudiant de l'Université Bordeaux 1 fournit un numéro INE qui sera associé à un mot de passe. On a donc quelque part dans le système de gestion des comptes une table d'association à index unique dont l'élément de séquence est :
Etudiant = structure
INE :entier;
motDePasse :typeMotDePasse;
finstructureV. Complexité▲
V-A. Définitions▲
Définition 4.1. (Notation de Landau). On dit que kitxmlcodeinlinelatexdvpf=O(g)finkitxmlcodeinlinelatexdvp s'il existe deux nombres réels kitxmlcodeinlinelatexdvpk,a > 0finkitxmlcodeinlinelatexdvp tels que kitxmlcodeinlinelatexdvp\forall x > a, \left | f(x) \right | \leq k \left | g(x) \right |finkitxmlcodeinlinelatexdvp.
Exemple 4.1. Si le nombre d'instructions est égal à kitxmlcodeinlinelatexdvpf ( n )= a n^{2}+bn+cfinkitxmlcodeinlinelatexdvp avec a,b,c des constantes réelles, alors kitxmlcodeinlinelatexdvpf ( n )= O ( n^{2} )finkitxmlcodeinlinelatexdvp.
Les figuresLes courbes « étalon » permettent de comparer les fonctions usuelles utilisées pour décrire la complexité d'un algorithme en fonction de la taille n des données d'entrées. Parmi les fonctions usuelles, le log à base 2 de kitxmlcodeinlinelatexdvpn\log_{2}(n)finkitxmlcodeinlinelatexdvp joue un rôle important. Pour un algorithme A, notons kitxmlcodeinlinelatexdvpC_{A}(D)finkitxmlcodeinlinelatexdvp, le coût de l'algorithme A pour une instance D.
Définition 4.2. On définit les trois complexités suivantes :
- complexité dans le pire des cas :
kitxmlcodeinlinelatexdvpC^{>} _{A}(n)=\max \{ C_{A}(d),d\ donnée\ de\ taille\ n \}finkitxmlcodeinlinelatexdvp - complexité dans le meilleur des cas :
kitxmlcodeinlinelatexdvpC^{<} _{A} (n =\min \{ C_{A} (d),d\ donnée\ de\ taille\ n \}finkitxmlcodeinlinelatexdvp - complexité en moyenne :
kitxmlcodeinlinelatexdvpC_{A}(n)= \sum_{d\ instance\ de\ A} Pr (d)C_{A}(d)finkitxmlcodeinlinelatexdvp
où kitxmlcodeinlinelatexdvpPr(d)finkitxmlcodeinlinelatexdvp est la probabilité d'avoir en entrée une instance kitxmlcodeinlinelatexdvpdfinkitxmlcodeinlinelatexdvp parmi toutes les données de taille kitxmlcodeinlinelatexdvpnfinkitxmlcodeinlinelatexdvp.
Soit kitxmlcodeinlinelatexdvpD_nfinkitxmlcodeinlinelatexdvp l'ensemble des instances de taille n. Si toutes les instances sont équiprobables, on a :
kitxmlcodelatexdvpC_{A} ( n )= \frac{1}{ | D_{n} |} \sum_{d\ instance\ de\ A}C_{A} ( d )finkitxmlcodelatexdvpParfois, il est nécessaire d'étudier la complexité en mémoire lorsque l'algorithme requiert de la mémoire supplémentaire (donnée auxiliaire de même taille que l'instance en entrée par exemple).
V-B. Structures de contrôle▲
Les algorithmes font intervenir les opérations élémentaires suivantes :
- opérations élémentaires +, -, *, / ;
- test d'expression booléenne ;
- appel de fonctions.
Les complexités en temps des structures sont données ci-dessous :
- bloc d'instructions : somme des coûts des instructions ;
-
Alternative :
- Alternative simple : un test,
-
Alternative multiple :
- complexité minimum : un test ,
- complexité maximum : nombre de cas possible-1 ;
-
Répétition
Soit kitxmlcodeinlinelatexdvpB_{T} ( n )finkitxmlcodeinlinelatexdvp (resp. kitxmlcodeinlinelatexdvpB_{O} ( n )finkitxmlcodeinlinelatexdvp) la complexité en nombre de tests (resp. d'opérations élémentaires) de la suite d'instructions à itérer, et kitxmlcodeinlinelatexdvpkfinkitxmlcodeinlinelatexdvp le nombre de fois où l'itération s'effectue alors la complexité sera de :- kitxmlcodeinlinelatexdvpk B_{T} ( n )+1finkitxmlcodeinlinelatexdvp pour le nombre de tests ;
- kitxmlcodeinlinelatexdvpk B_{O} ( n )finkitxmlcodeinlinelatexdvp pour le nombre d'opérations du « tant que » et du « répéter » ;
- kitxmlcodeinlinelatexdvpk (B_{O} ( n ) +1 )finkitxmlcodeinlinelatexdvp pour le nombre d'opérations du « pour ».
V-C. Exemples▲
V-C-1. Somme des N premiers entiers▲
fonction suite(val n :entier) :entier;
var i,s :entier;
début
s = 0;
pour i allant de 1 à n faire
s = s + i;
finpour;
retourner(s)
fin
finfonction;On a :
kitxmlcodelatexdvpC_{suite}^{>} ( n )=C_{suite}^{<} ( n )=C_{suite} ( n )=O ( n )finkitxmlcodelatexdvpV-C-2. Apparition d'une pile dans une suite de n lancers d'une pièce▲
Entrée : un entier n
Sortie : « vrai » si on rencontre une pile, « faux » sinon.
La fonction suivante retourne « vrai » lorsque l'un des lancers est égal à 6 et « faux » sinon.
fonction jeuDePile(val n :integer) :booléen;
var i : entier;
début
pour i allant de 1 à n faire
f = résultat_lancer_pièce()
si (f==pile) alors
retourner(vrai)
finsi
finpour
retourner(faux)
fin
finFonction- kitxmlcodeinlinelatexdvpC_{suite}^{>} ( n )=O ( n )finkitxmlcodeinlinelatexdvp (On ne tire jamais de pile)
- kitxmlcodeinlinelatexdvpC_{pile}^{<} ( n )=O ( 1 )finkitxmlcodeinlinelatexdvp (On tire une pile le premier coup)
- Les faces du dé apparaissent de manière équiprobable et les tirages sont indépendants. On peut montrer que le coût moyen de l'algorithme est : kitxmlcodeinlinelatexdvpC_{pile} ( n )=O ( 1 )finkitxmlcodeinlinelatexdvp.
V-D. Les courbes « étalon »▲
V-E. Formule de Stirling▲
VI. Tableaux▲
VI-A. Définition▲
Définition 5.1. Un tableau est une table d'association à clé uniqueTable d'association à clé unique telle que :
- le nombre d'éléments de la table (dimension ou taille) est constant ;
- l'accès aux éléments s'effectue directement par la clé ;
- les valeurs minimum et maximum des clés sont des constantes.
On écrit en EXALGO :
nom_tableau = tableau[min_indice..max_indice] de type_predefini;ce qui signifie que :
- les éléments ont pour type le type_prédéfini ;
- les indices des éléments vont de min_indice à max_indice, avec min_indice < max_indice.
La taille du tableau est donc max_indice - min_indice + 1. Pour accéder à un élément d'un tableau T d'indice I, on écrit T[I]. La complexité de l'accès à un élément du tableau est kitxmlcodeinlinelatexdvpO(1)finkitxmlcodeinlinelatexdvp.
Soit min_indice< i<j <max_indice, on notera T[i..j] la séquence des éléments de T (T[i],T[i+1],…,T[j]).
Beaucoup d'algorithmes peuvent être décrits sans préciser un type particulier. Dans ce cas, on écrira à la place de type_prédéfini le mot élément et on précisera les valeurs possibles pour élément.
Exemple 5.1. Soit deux tableaux :
- TC =
tableau[1..10]de car; ; - TE =
tableau[1..10]d'entiers;.
L'algorithme qui permet de trier TC et TE est le même. Seul diffère le type de l'élément manipulé. On écrira dans ce cas un algorithme sur un tableau.
T = tableau[1..10] d'éléments;et on précisera que l'élément est dans {car,entier}.
VI-B. Primitives▲
Les paramètres tableaux doivent, sauf raison majeure, être passés en paramètre par référence afin d'éviter la recopie.
VI-B-1. Initialisation d'un tableau▲
fonction init(ref T :tableau[min_indice..max_indice] d'éléments;
val valeurInitiale :élément) :vide;
var i :entier;
début
pour i allant de min_indice à max_indice faire
T[i] = valeurInitiale
finpour
fin
finfonctionComplexité : kitxmlcodeinlinelatexdvpO(n)finkitxmlcodeinlinelatexdvp
VI-B-2. Taille d'un tableau▲
fonction taille(ref T :tableau[min_indice..max_indice] d'éléments) :entier;
début
retourner(max_indice - min_indice + 1)
fin
finfonctionComplexité : kitxmlcodeinlinelatexdvpO(1)finkitxmlcodeinlinelatexdvp.
VI-B-3. Échange d'éléments▲
fonction echange(ref T :tableau[min_indice..max_indice] d'éléments;
val indice1,indice2 : entier) :vide;
var e :élément;
début
e = T[indice1];
T[indice1] = T[indice2];
T[indice2] = e;
fin
finfonctionComplexité : kitxmlcodeinlinelatexdvpO(1)finkitxmlcodeinlinelatexdvp.
VI-B-4. Copie de tableau▲
fonction copie(ref T1,T2 :tableau[min_indice..max_indice] d'élément;
val indiceT1_1,indiceT1_2,indiceT2 : entier) :booléen;
var i :entier;
début
si indiceT2+indiceT1_2-indiceT1_1>max_indice alors
retourner(faux)
sinon
pour i allant de indiceT1_1 à indiceT1_2 faire
T2[indiceT2] = T1[i];
indiceT2 = indiceT2 + 1;
finpour
retourner(vrai)
fin
finfonctionComplexité :
- minimum : kitxmlcodeinlinelatexdvpO(1)finkitxmlcodeinlinelatexdvp
- maximum : kitxmlcodeinlinelatexdvpO(n)finkitxmlcodeinlinelatexdvp
VI-C. Quelques exemples d'algorithmes▲
VI-C-1. Somme des éléments d'un tableau d'entiers▲
fonction somme(ref T :tableau[min_indice..max_indice] d'entiers) :entier;
var s,i :entier;
début
s = 0;
pour i allant de min_indice à max_indice faire
s = s + T[i]
finpour
retourner(s)
fin
finfonctionComplexité : kitxmlcodeinlinelatexdvpO(n)finkitxmlcodeinlinelatexdvp
VI-C-2. Recherche d'un élément▲
Propriété 5.2. Soit i,j deux entiers, i<=j. Soit T un tableau d'éléments d'indice variant entre i et j. Pour tout élément e, appartenant au tableau T, on a :
|
T[i] = e ou e est dans T[i+1..j] |
fonction cherche(ref T :tableau[min_indice..max_indice] d'éléments;val e :élément) :entier;
var i :entier;
début
pour i allant de min_indice à max_indice faire
si T[i]==e alors
retourner(i)
finsi
finpour
retourner()
fin
finfonctionComplexité :
- minimum : kitxmlcodeinlinelatexdvpO(1)finkitxmlcodeinlinelatexdvp
- maximum : kitxmlcodeinlinelatexdvpO(n)finkitxmlcodeinlinelatexdvp
VI-C-3. Recherche de l'indice du premier élément minimum▲
On suppose que le tableau contient des éléments comparables (l'ensemble des éléments est muni d'une relation d'ordre). Choisissons ici, pour simplifier les notations, des entiers.
Propriété 5.3. Soit i,j deux entiers, i<=j. Soit T un tableau d'entiers d'indice variant entre i et j. Soit m l'élément minimum du tableau, on a :
|
T[i] = m ou m est dans T[i+1..j] |
fonction minimum(ref T :tableau[min_indice..max_indice] d'entier) :entier;
var i,sauv :entier;
début
sauv = min_indice;
pour i allant de min_indice+1 à max_indice faire
si T[i]<T[sauv] alors
sauv = i
finsi
finpour
retourner(sauv)
finfonctionComplexité : kitxmlcodeinlinelatexdvpO(n)finkitxmlcodeinlinelatexdvp
VI-D. Matrices▲
VI-D-1. Déclaration▲
Une matrice M de dimension kitxmlcodeinlinelatexdvpn \times mfinkitxmlcodeinlinelatexdvp est un tableau de dimension n dont chaque élément est un tableau de dimension m. On peut donc déclarer la matrice sous la forme suivante :
var M :tableau[1..n] de tableau [1..m] d'éléments;VI-D-2. Initialisation▲
fonction initMatrice(ref M :tableau[1..n] de tableau [1..m] d'éléments;
val valeurInitiale :élément) :vide;
var i,j :entier;
début pour i allant de 1 à n faire
pour j allant de 1 à m faire
M[i][j] = valeurInitiale
finpour
finpour
retourner()
finfonctionComplexité : kitxmlcodeinlinelatexdvpO(nm)finkitxmlcodeinlinelatexdvp
VI-D-3. Somme de deux matrices réelles▲
fonction sommeMatrice(ref M1,M2 :tableau[1..n] de tableau [1..m] de réels) :
tableau[1..n] de tableau [1..m] de réels;
var i,j :entier;
var M :tableau[1..n] de tableau [1..m] de réels;
début
pour i allant de 1 à n faire
pour j allant de 1 à m faire
M[i][j] = M1[i][j] + M2[i][j];
finpour
finpour
retourner(M)
finfonctionComplexité : kitxmlcodeinlinelatexdvpO(nm)finkitxmlcodeinlinelatexdvp
VII. Tri non récursif▲
On considérera dans tout ce chapitre que l'on manipule des entiers. L'objet du tri est d'ordonner une séquence de N entiers. On considérera que ces entiers sont rangés dans un tableau.
var T :tableau[1..N] d'entiers;De plus, on considéra que l'ordre est croissant.
VII-A. Tri sélection▲
Ce tri est basé sur l'algorithme de recherche du minimumRecherche de l'indice du premier élément minimum On adapte cet algorithme pour pouvoir effectuer la recherche dans un sous-tableau. On a le déroulement ici.
fonction minimumSoustableau(ref T :tableau[1..N] d'entiers, val Imin,Imax :entier) :entier;
var sauv :entier;
début
sauv = Imin;
pour i allant de Imin+1 à Imax faire
si T[i]<T[sauv] alors
sauv = i;
finsi
finpour
retourner(sauv);
fin
finfonction
fonction triSelection(ref T :tableau[1..N] d'entiers) :vide;
var i,j,indice_cle :entier;
début
pour i allant de 1 à N-1 faire
indice_cle = minimumSoustableau(T,i,N);
echange(T[i],T[indice_cle]);
finpour
fin
finfonctionPropriété 6.1. La complexité de l'algorithme triSelection sur une instance de taille N est kitxmlcodeinlinelatexdvpO(n^2)finkitxmlcodeinlinelatexdvp
VII-B. Tri insertion et tri à bulle▲
Propriété 6.2. Soit T un tableau d'entiers trié d'indice variant entre i et j. Soit e un entier quelconque, alors on a l'une des propriétés suivantes :
- e ≤ T[i] ;
- il existe un unique entier k dans [i..j-1] tel que T[k] < e ≤ T[k+1] ;
- e > T[j].
On déduit de cette propriété deux algorithmes permettant de trier un tableau.
VII-B-1. Tri insertion▲
fonction triInsertion(ref T :tableau[1..N] d'entiers) :vide;
var i,j,cle :entier;
début
pour i allant de 2 à N faire
cle = T[i];
j = i-1;
tant que j>0 et T[j]>cle faire
T[j+1] = T[j];
j = j-1;
fintantque
T[j+1] = cle;
finpour
fin
finfonctionOn a le déroulement ici.
Propriété 6.3. La complexité de l'algorithme triInsertion sur une instance de taille N est :
- au minimum en kitxmlcodeinlinelatexdvpO(N)finkitxmlcodeinlinelatexdvp ;
- au maximum et en moyenne en kitxmlcodeinlinelatexdvpO(N^2)finkitxmlcodeinlinelatexdvp.
Idée de la démonstration
La boucle « pour » s'effectue systématiquement et demandera kitxmlcodeinlinelatexdvpO(N)finkitxmlcodeinlinelatexdvp opérations.
La boucle « tant que » effectue au minimum kitxmlcodeinlinelatexdvpO(1)finkitxmlcodeinlinelatexdvp opération (cas où les nombres sont déjà triés) et au maximum kitxmlcodeinlinelatexdvpO(N)finkitxmlcodeinlinelatexdvp.
La boucle « tant que » effectue en moyenne kitxmlcodeinlinelatexdvpO(N/2)finkitxmlcodeinlinelatexdvp opérations.
VII-B-2. Tri à bulle▲
fonction triBulle(ref T :tableau[1..N] d'entiers) :vide;
var i,j,cle :entier;
début
pour i allant de 1 à N-1 faire
pour j allant de N à i+1 par pas de -1 faire
si T[j] < T[j-1] alors
echange(T, j, j-1);
finsi
finpour
finpour
fin
finfonctionOn a le déroulement ici.
Propriété 6.4. La complexité de l'algorithme triBulle sur une instance de taille N est kitxmlcodeinlinelatexdvpO(N^2)finkitxmlcodeinlinelatexdvp.
VII-C. Fusion de tableaux triés▲
Lorsque deux tableaux T1 et T2 sont triés, il est aisé de construire un nouveau tableau contenant la séquence triée regroupant les séquences correspondantes à T1 et T2.
PREMIERE VERSION
fonction fusion(ref T1 :tableau[1..N1] d'entier;
ref T2 :tableau[1..N2] d'entier
) :tableau[1..N1+N2] d'entier;
var I1,I2,i :entier;
var T :tableau[1..N1+N2] d'entier;
début
I1 = 1;
I2 = 1;
pour i allant de 1 à N1+N2 faire
si T1[I1]≤T2[I2] alors
T[i] = T1[I1];
I1 = I1+1;
sinon
T[i] = T2[I2];
I2 = I2+1;
finsi
finpour
retourner(T)
fin
finfonctionComplexité : kitxmlcodeinlinelatexdvpO(n)finkitxmlcodeinlinelatexdvp
Cette version ne fonctionne pas toujours. Par exemple, si I1 a dépassé N1 et vaut par exemple N1+1, on comparera T1[N1+1] à T2[I2] ce qui n'a pas de sens. Il faut donc utiliser un algorithme exactAlgorithme de fusion de deux tableaux. On a le déroulement ici.
VII-D. Tri par dénombrement▲
Soit une séquence d'éléments de [0..k], il est alors possible de réaliser l'histogramme des valeurs. Par la suite le tri des éléments de la séquence se fait en temps linéaire kitxmlcodeinlinelatexdvpO(n)finkitxmlcodeinlinelatexdvp.
fonction triHisto(ref T :tableau[1..N] d'entiers) :vide;
var H :tableau[0..maximum(T)] d'entier;
var i,j,k,max : entier;
début
init(H,0);
pour i allant de 1 à N faire
H[T[i]] = H[T[i]] + 1;
finpour
i = 1;
max = maximum(T);
pour j allant de 0 à max faire
pour k allant de 1 à H[j] faire
T[i] = j;
i = i+1;
finpour
finpour
fin
finfonctionOn a le déroulement ici.
VII-E. Algorithme de fusion de deux tableaux▲
VII-E-1. Aide▲
On considère une nouvelle fonction copie qui copie un tableau dans un autre même s'ils n'ont pas la même définition. L'en-tête de la fonction est :
fonction copie(ref T1:tableau[1..N1] d'élément;
ref T2:tableau[1..N2] d'élément;
val indiceT1_1,indiceT1_2,indiceT2: entier):vide;Le schéma de la fonction fusion est alors le suivant :
fonction fusion(ref T1:tableau[1..N1] d'entier;
ref T2:tableau[1..N2] d'entier
):tableau[1..N1+N2] d'entier;
var I1,I2,i:entier;
var T:tableau[1..N1+N2] d'entier;
début
Initialiser I1,I2,i
tant que I1 ≤ N1 et I2 ≤ N2 faire
// ... On compare tant qu'il reste des éléments dans T1 et T2
fintantque
si I1 ≤ N1 alors
// il n'y a plus d'éléments dans T2 :copier(..........)
sinon
// il n'y a plus d'éléments dans T1 :copier(..........)
finsi
retourner(T)
fin
finfonctionVII-E-2. Algorithme de fusion▲
fonction fusion(ref T1:tableau[D1..N1] d'entier;
ref T2:tableau[D2..N2] d'entier
):tableau[1..N1+N2-D1-D2+2] d'entier;
var I1,I2,i: entier;
var T:tableau[1..N1+N2-D1-D2+2] d'entier;
début
i = 1;
I1 = D1;
I2 = D2;
tant que I1 ≤ N1 et I2 ≤ N2 faire
si T1[I1] ≤ T2[I2] alors
T[i] = T1[I1];
I1 = I1+1;
sinon
T[i] = T2[I2];
I2 = I2+1;
finsi
i = i+1
fintantque
si I1 ≤ N1 alors
copier(T1,T,I1,N1,i)
sinon
copier(T2,T,I2,N2,i)
finsi
retourner(T)
fin
finfonctionVII-E-3. Algorithme de fusion pour des morceaux de tableaux▲
fonction fusion(ref T1:tableau[D1..N1] d'entier;
ref T2:tableau[D2..N2] d'entier;
val DT1,FT1,DT2,FT2:entier):
tableau[1..FT1+FT2-DT1-DT2+2] d'entier;
var I1,I2,i:entier;
var T:tableau[1..FT1+FT2-DT1-DT2+2] d'entier;
début
i = 1;
I1 = DT1;
I2 = DT2;
tant que I1 ≤ FT1 et I2 ≤ FT2 faire
si T1[I1] ≤ T2[I2] alors
T[i] = T1[I1];
I1 = I1+1;
sinon
T[i] = T2[I2];
I2 = I2+1;
finsi
i = i+1
fintantque
si I1 ≤ FT1 alors
copier(T1,T,I1,FT1,i)
sinon
copier(T2,T,I2,FT2,i)
finsi
Retourner(T)
fin
finfonctionVIII. Retour sur les fonctions, récursivité▲
VIII-A. Visibilité▲
Comme vu au chapitre Codage et structures de contrôleCodage et structures de contrôle, on peut déclarer dans une fonction des variables et des fonctions locales :
fonction NomDeFonction (ListeParamètres) :TypeRésultat;
// déclarations des variables ou fonctions locales
début
// partie instruction qui contient l'appel à retourner
fin
finFonctionLa multi-imbrication possible des fonctions entraîne l'existence de problèmes de visibilité : entre les variables et entre les fonctions.
VIII-A-1. Visibilité d'une variable▲
- Règle 1 : une variable V (locale ou non) est visible depuis sa déclaration jusqu'au marqueur
finFonctionde la fonction F où elle a été déclarée. - Règle 2 : si une fonction G est locale à F et déclare une variable V déjà déclarée dans F alors la variable originelle est momentanément cachée.
VIII-A-2. Exemple▲
Soit la fonction P suivante :
fonction P (....) :....;
var x,y,z : entier ;
fonction R() :vide;
var z,u,v : entier ;
début
z = 0;
u = 6;
...
fin ;
finFonction
fonction Q(ref x :entier ) :....;
var u,y : entier ;
début
y = 4;
x = x+y;
u = 7
fin ;
finFonction
début
x = 1;
y = 2;
z = 3;
R() …
Q(z);
fin
finFonction- La fonction P déclare trois variables locales x, y, z et deux fonctions locales Q et R.
- La fonction Q déclare deux variables locales u, y et un paramètre x.
- La fonction R déclare trois variables locales z, u et v.
On a le déroulement ici.
VIII-A-3. Visibilité d'une fonction▲
Une fonction est visible depuis la fin de son entête jusqu'au finFonction de la fonction où elle a été déclarée. Cependant comme pour les variables, elle peut momentanément être cachée par une autre fonction ayant le même entête (surcharge).
VIII-A-3-a. Exemple▲
La fonction P suivante est annotée pour préciser la visibilité des fonctions Q,R,T.
fonction P(....) :....;
.....
fonction Q(....) :.....;
.....
fonction R(...) :.....;
....
début
....// on peut utiliser P,Q,R
fin
finFonction ;
début
....// on peut utiliser P,Q,R
fin
finFonction
fonction T(...) :...;
début
....// on peut utiliser P,Q,T mais pas R
fin
finFonction ;
début
... //// on peut utiliser P,Q,T mais pas R
fin
finFonctionVIII-B. Récursivité▲
La récursivité consiste à remplacer une boucle par un appel à la fonction elle-même. Considérons la suite factorielle, elle est définie par :
- kitxmlcodeinlinelatexdvp0! = 1finkitxmlcodeinlinelatexdvp ;
- kitxmlcodeinlinelatexdvpn! = n(n-1)!finkitxmlcodeinlinelatexdvp.
La fonction peut s'écrire simplement :
fonction factorielle(val n :entier) :entier;
début
si (n == 0)
retourne(1)
sinon
retourne(factorielle(n-1) * n)
finsi
fin
finfonction;On a le déroulement ici. On peut décrire sur le papier les changements et les appels sous la forme suivante :
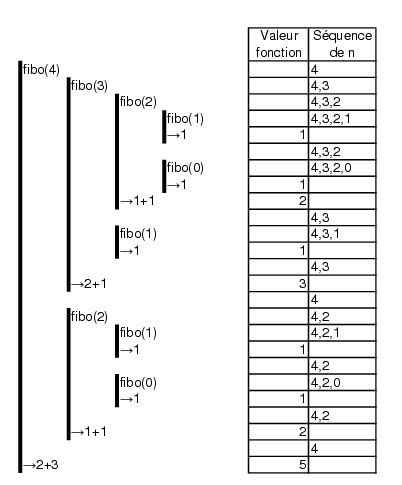
Plusieurs appels à la fonction peuvent être exécutés dans son corps. Soit la suite dite de Fibonacci définie par :
- kitxmlcodeinlinelatexdvpu_{0}=1finkitxmlcodeinlinelatexdvp ;
- kitxmlcodeinlinelatexdvpu_{1}=1finkitxmlcodeinlinelatexdvp ;
- kitxmlcodeinlinelatexdvpu_n=u_{n+1}+u_{n+2}\ \mathrm{pour}\ n>2finkitxmlcodeinlinelatexdvp.
La fonction s'écrit tout aussi simplement :
fonction fibo(val n :entier) :entier;
début
si (n == 0) ou (n == 1) alors
retourne(1)
sinon
retourne(fibo(n-1) + fibo(n-2))
finsi
fin
finfonction;On a le déroulement ici. On peut décrire sur le papier les changements et les appels sous la forme suivante :
VIII-C. Complexité▲
Examinons la suite définie par :
- kitxmlcodeinlinelatexdvpu_{1}=1finkitxmlcodeinlinelatexdvp ;
- kitxmlcodeinlinelatexdvpu_{n}=u_{n-1}+n\ \mathrm{pour}\ n>1finkitxmlcodeinlinelatexdvp.
Une fonction permettant le calcul de son ne terme est :
fonction suite(val n :entier) :entier;
var i,s :entier;
début
s = 0;
pour i allant de 1 à n faire
s = s+i;
finpour;
retourner(s)
fin
finfonction;L'exemple ci-dessus devient en algorithme récursif :
fonction suiteR(val n :entier) :entier;
début
si n == 1 alors
retourne(1)
sinon
retourne(suiteR(n-1) + n)
finsi
fin
finfonction;La complexité en nombre d'opérations de suite et suiteR est en kitxmlcodeinlinelatexdvpO(n)finkitxmlcodeinlinelatexdvp. On aurait donc tendance à préférer suiteR pour sa lisibilité. Cependant, si on examine la complexité en mémoire, suite est en kitxmlcodeinlinelatexdvpO(1)finkitxmlcodeinlinelatexdvp alors que suiteR est en kitxmlcodeinlinelatexdvpO(n)finkitxmlcodeinlinelatexdvp.
La programmation non récursive est donc plus efficace. L'utilisation de la récursivité ne doit pas se faire au détriment de l'efficacité.
VIII-D. Exemples▲
Chaque fois que l'on désire programmer une fonction récursive, on doit répondre aux questions suivantes :
- comment le problème au rang n se déduit-il de la solution à un (des) rang(s) inférieur(s) ?
- quelle est la condition d'arrêt de la récursivité ?
VIII-D-1. Recherche d'un élément dans un tableau d'entiers▲
fonction cherche(ref T :tableau[min_indice..max_indice] d'éléments;
val e : élément) :entier;
début
si T[min_indice] == e alors
retourner(min_indice)
sinon
si min_indice == max_indice alors
retourner(NUL)
sinon
retourner(cherche(T[min_indice+1..max_indice], e))
finsi
finsi
fin
finfonctionVIII-D-2. Minimum dans un tableau d'entiers▲
fonction minimumTableau(ref T :tableau[1..N] d'entiers;
val Imin :entier) :entier;
var sauv :entier;
début
si Imin == N alors
retourner(T[N])
sinon
sauv = minimumTableau(T, Imin+1];
si T[Imin] < sauv alors
retourner(T[Imin])
sinon
retourner(sauv)
finsi
finsi
fin
finfonctionIX. Diviser pour régner▲
IX-A. Dichotomie▲
La dichotomie fait partie des méthodes dites « diviser pour régner ». Elle consiste pour un objet de taille N à exécuter un algorithme de façon à réduire le problème à un objet de taille N/2. On répète alors l'algorithme de réduction sur ce dernier objet. Ainsi, il suffit de connaître la résolution pour un problème de taille faible (typiquement N=1 ou N=2) pour obtenir la totalité de la résolution.Ce type d'algorithme est souvent implémenté de manière récursive. Lorsque cette technique est utilisable, elle conduit à un algorithme très efficace et très lisible.
Il est parfois nécessaire de traiter les données avant d'appeler la fonction récursive. La fonction récursive est alors une fonction locale à la fonction d'appel.
IX-B. Exemples▲
IX-B-1. Recherche du zéro d'une fonction croissante▲
Soit g une fonction croissante sur un intervalle [a,b] et telle que f(a)≤0 et f(b)≥0. L'algorithme ci-dessous permet de trouver la valeur x de [a,b] telle que f(x)=0 avec une précision e.
fonction zero(ref g(val n :réel) :fonction;val a,b,e :réel) :réel;
var M :réel;
début
M = g((a+b)/2);
si |M| < e alors
retourne((a+b)/2)
sinon
si M > 0 alors
zero(g, a, (a+b)/2, e)
sinon
zero(g, (a+b)/2, b, e)
finsi
finsi
fin
finfonctionIX-B-2. Trouver un élément dans un tableau ordonné▲
Nous avons déjà traité cet algorithme sous une autre forme au chapitre TableauxQuelques exemples d'algorithmes.
Propriété 8.1. T un tableau d'entiers triés d'indice variant entre d et f. Posons kitxmlcodeinlinelatexdvpm = \left \lfloor (d+f)/2 \right \rfloorfinkitxmlcodeinlinelatexdvp. Soit e un entier appartenant à la séquence contenue dans T. On a l'une des propriétés suivantes :
- T[m] = e ;
- e est dans la séquence contenue dans T[d..m-1] ;
- e est dans la séquence contenue dans T[m+1..f].
fonction cherche(ref T :tableau[1..N] d'entiers; val e :entier) :entier;
var d,f :entier;
fonction chercheRec(ref T :tableau[1..N] d'entiers; val d,f,e :entier) :entier; var m;
début
si f == d alors
si T[d] == e alors
retourner(f)
sinon
retourner(NUL)
finsi
sinon
m = partieEntiere((d+f)/2);
si T[m] < e alors
retourner(chercheRec(T,m+1,f,e))
sinon
retourner(chercheRec(T,d,m,e))
finsi
finsi
fin
finfonction
début
d = 1;
f = N;
retourner(chercheRec(T,d,f,e))
fin
finfonctionPropriété 8.2. La complexité de la fonction cherche est kitxmlcodeinlinelatexdvpO(\log_2(n))finkitxmlcodeinlinelatexdvp.
Idée de la preuve : la complexité de la fonction cherche est donnée par la complexité de chercheRec. Soit kitxmlcodeinlinelatexdvpf(n)finkitxmlcodeinlinelatexdvp le nombre de tests effectués par cette fonction.
On a :
Soit p tel que kitxmlcodeinlinelatexdvp2^{p}\leq n\leq 2^{p+1}finkitxmlcodeinlinelatexdvp. On a donc kitxmlcodeinlinelatexdvpp\leq \log_2(n)\leq p+1finkitxmlcodeinlinelatexdvp. De plus : kitxmlcodeinlinelatexdvpf(n)=2\sum\limits_{i=0}^{p} 1finkitxmlcodeinlinelatexdvp et donc kitxmlcodeinlinelatexdvpf(n)=2\times ( p+1 )finkitxmlcodeinlinelatexdvp.
IX-B-3. Remarque▲
L'algorithme de multiplication de deux matrices de dimension kitxmlcodeinlinelatexdvpn \times nfinkitxmlcodeinlinelatexdvp s'implémente facilement en kitxmlcodeinlinelatexdvpO(n^3)finkitxmlcodeinlinelatexdvp. Strassen a montré qu'en utilisant une méthode « diviser pour régner », la multiplication peut s'effectuer en kitxmlcodeinlinelatexdvpO \left(n^{\ln(7)/\ln(2)}\right)finkitxmlcodeinlinelatexdvp.
La courbe se présente comme suit :
IX-C. Complexité▲
Un algorithme « diviser pour régner » a la structure suivante :
- Construire une solution élémentaire pour kitxmlcodeinlinelatexdvpn \leq n0finkitxmlcodeinlinelatexdvp ;
- Pour résoudre un problème de taille kitxmlcodeinlinelatexdvpn>n0finkitxmlcodeinlinelatexdvp, l'algorithme consiste à décomposer le problème en sous-problèmes ayant tous la taille n/b (peut-être approximativement) ;
- À appliquer l'algorithme à tous les sous-problèmes ;
- À construire une solution du problème en composant les solutions des sous-problèmes.
La complexité en temps de l'algorithme est donc déterminée par une équation de récurrence de la forme :
kitxmlcodelatexdvpC(n) = aC(n/b) + d(n)finkitxmlcodelatexdvpqui après résolution permet de montrer que cette méthode conduit à des algorithmes plus efficaces en nombre d'opérations. Cependant, cela ne doit pas occulter l'aspect mémoire. La complexité en mémoire doit rester d'un ordre raisonnable. (cf. récursivitéRécursivité).
X. Tris récursifs▲
On considérera dans tout ce chapitre que l'on manipule des entiers. L'objet du tri est d'ordonner une séquence de N entiers. On considérera que ces entiers sont rangés dans un tableau :
var T :tableau[1..N] d'entiers;De plus, on considéra que l'ordre est croissant.
X-A. Tri fusion ▲
Cet algorithme consiste à diviser la séquence d'entiers en deux sous-séquences, à les trier de manière récursive, puis à fusionner les deux sous-séquences triées. On utilise la fonction fusionAlgorithme de fusion de deux tableaux vue au chapitre tris non récursifsTri non récursif.
fonction triFusion(ref T :tableau[1..N] d'entiers) :vide;
var d,f :entier;
fonction fusionLocal(ref T :tableau[1..N] d'entier;
val d,m,f :entier) :vide;
var C :tableau[1..f-d+1] d'entier;
début
C = fusion(T,T,d,m,m+1,f);
copie(C,T,d,f,d);
fin
finfonction
fonction triFusionRec(ref T :tableau[1..N] d'entiers; val d,f :entier) :vide;
début
si d<f alors
m = partieEntiere((d+f)/2);
triFusionRec(T,d,m);
triFusionRec(T,m+1,f);
fusionLocal(T,d,m,f);
finsi
fin
finfonction
début
trifusionRec(T,1,N)
fin
finfonctionOn a le déroulement ici.
Propriété 9.1. La complexité du tri fusion pour une séquence de n éléments est kitxmlcodeinlinelatexdvpO(n\log_{2}(n))finkitxmlcodeinlinelatexdvp.
idée de la preuve : la complexité de la fonction triFusion est donnée par la complexité de triFusionRec. Soit kitxmlcodeinlinelatexdvpf(n)finkitxmlcodeinlinelatexdvp le nombre de tests effectués par cette fonction. On a :
kitxmlcodelatexdvp\begin{eqnarray} f(n) & = 1 + 2f(\left \lfloor n/2 \right \rfloor) + 3n \\ f(1) &=0 \end{eqnarray}finkitxmlcodelatexdvpSoit p tel que kitxmlcodeinlinelatexdvp2^{p}\leq n\leq 2^{p+1}finkitxmlcodeinlinelatexdvp. On a donc kitxmlcodeinlinelatexdvpp\leq \log_{2}(n)\leq p+1finkitxmlcodeinlinelatexdvp
On en déduit :
kitxmlcodelatexdvpf ( n )=\sum_{i=0}^{p}2^{i}+3pnfinkitxmlcodelatexdvpet
kitxmlcodelatexdvpf ( n )=2^{p+1}+3pn-1finkitxmlcodelatexdvpX-B. Tri rapide▲
Cet algorithme consiste à utiliser une valeur x de la séquence pour diviser la séquence d'entiers en deux sous-séquences :
- l'ensemble des valeurs inférieures ou égales à x ;
- l'ensemble des valeurs supérieures à x.
Puis la procédure s'effectue récursivement sur les deux sous-séquences :
fonction triRapide(ref T :tableau[1..N] d'entiers) :vide;
fonction diviserSequence(ref T :tableau[1..N] d'entier;
val d,f :entier) :entier;
var x,i :entier;
début
x = T[f];
i = d-1;
pour j allant de d à f-1 faire
si T[j] ≤ x alors
i = i+1;
echanger(T,i,j);
finsi
finpour
echanger(T,i+1,f);
retourner(i+1);
fin
finfonction
fonction triRapideRec(ref T :tableau[1..N] d'entiers; val d,f :entier) :vide;
var p :entier;
début
si d<f alors
p = diviserSequence(T,d,f);
triRapideRec(T,d,p-1);
triRapideRec(T,p+1,f);
finsi
fin
finfonction
début
triRapideRec(T,1,N)
fin
finfonctionOn a le déroulement ici.
Propriété 9.2. La complexité du tri rapide pour une séquence de n éléments est :
- au maximum en kitxmlcodeinlinelatexdvpO ( n^{2} )finkitxmlcodeinlinelatexdvp ;
- en moyenne et au minimum en kitxmlcodeinlinelatexdvpO(n\log(n))finkitxmlcodeinlinelatexdvp.
XI. Une implémentation des polynômes▲
XI-A. Énoncé▲
Décrire une structure permettant de gérer des polynômes définis sur les réels. Écrire un ensemble de primitives associées permettant les principales opérations.
XI-B. Structure et primitives ▲
On note n le degré (resp. le degré maximum) du polynôme (resp. des polynômes).
XI-B-1. Structure ▲
Un polynôme peut être défini par son degré et un tableau contenant les coefficients. On définit également une primitive d'initialisation.
constante Taille = 200;
type polynome = structure
coeff:tableau[0..200] de réels;
degre: entier;
finstructure
fonction init(ref p:polynome):vide;
var i:entier;
début
p.degre = 0;
pour i allant de 0 à Taille faire
p.coeff[i] = 0;
finpour
fin
finfonctionXI-B-2. Addition ▲
On notera l'analogie avec l'algorithme de fusion de tableau.
fonction ajoute(ref p1,p2:polynome):polynome;
var p:polynome;
var m,i:entier;
début
m = min(p1.degre,p2.degre);
pour i de 0 à m faire
p.coeff[i] = p1.coeff[i] + p2.coeff[i]
finpour;
si m < p1.degre alors
pour i de m+1 to p1[degre] do
p.coeff][i] = p1.coeff][i];
finpour:
p.degre = p1.degre;
sinon
pour i de m+1 to p2[degre] do
p.coeff[i] = p2.coeff[i];
finpour:
p.degre = p2.degre;
finsi
retourner(p);
fin;
finfonction;Complexité : kitxmlcodeinlinelatexdvpO ( { n } )finkitxmlcodeinlinelatexdvp
XI-B-3. Multiplication▲
fonction multiplie(ref p1,p2:polynome):polynome;
var p:polynome;
var i,j:entier;
début
init(p);
p.degre=p1.degre + p2.degre;
pour i de 0 à p1.degre;
pour j de 0 à p2.degre faire
p.coeff[i+j] = p.coeff[i+j] + p1.coeff[i] * p2.coeff[j];
finpour
finpour
retourner(p);
fin
finfonctionComplexité : kitxmlcodeinlinelatexdvpO(n^2)finkitxmlcodeinlinelatexdvp
XI-B-4. Polynôme opposé▲
Soit :
kitxmlcodelatexdvpP ( x )=\sum _{i=0}^{n}{a_i x^i}finkitxmlcodelatexdvpLe polynôme opposé est :
kitxmlcodelatexdvpQ ( x )=\sum _{i=0}^{n}{-p_ix^i}finkitxmlcodelatexdvpfonction moins(ref p:polynome):polynome;
var i:entier;
var m:polynome;
début
m.degre=p.degre;
pour i de 0 à p.degre faire
m.coeff[i] =- p.coeff[i];
finpour
retourner(m)
fin
finfonctionComplexité : kitxmlcodeinlinelatexdvpO(n)finkitxmlcodeinlinelatexdvp
XI-B-5. Multiplication par xn▲
fonction decale(ref p:polynome;val n:entier):polynome
var i:entier;
var d:polynome;
début
d.degre = p.degre + n;
si n>0 then
pour i de 0 à n-1 FAIRE
d.coeff[i] = 0;
finpour
pour i de 0 à p.degre faire
d.coeff[i+n] = p.coeff[i];
finpour
sinon
pour i de -n à p.degre faire
d.coeff[i+n] = p.coeff[i];
finpour
finsi
retourner(d)
fin
finfonctionComplexité : kitxmlcodeinlinelatexdvpO(n)finkitxmlcodeinlinelatexdvp
XI-B-6. Dérivée▲
fonction deriv(ref p1:polynome):polynome;
var p:polynome;
var i:entier;
début
si p1.degre == 0 alors
p.degre = 0;
p.coeff[0] = 0;
sinon
p.degre = p1.degre-1;
pour i de 1 à p1.degre faire
p.coeff[i-1] = p1.coeff[i]
finpour;
finsi;
retourner(p)
fin
finfonctionComplexité : kitxmlcodeinlinelatexdvpO(n)finkitxmlcodeinlinelatexdvp
XI-B-7. Valeur en un point▲
fonction valeur(ref p:polynome;val x: réel):réel;
var f,s,i:réel;
début
s = 0;
f = 1;
pour i allant de 0 à p.degre faire
s = s + f * p.coeff[i];
f = f * x
finpour
retourner(s)
fin
finfonctionComplexité : kitxmlcodeinlinelatexdvpO(n)finkitxmlcodeinlinelatexdvp
XI-B-8. Intégrale définie▲
fonction integraleDefinie(ref p1:polynome;val x,y: réel):réel;
var p:polynome;
var s:réel;
var i:entier;
début
p.degre = p1.degre+1;
p.coeff[0] = 0;
pour i allant de 0 à p1.degre faire
p.coeff[i+1] = p1.coeff[i] / (i+1);
finpour;
retourner(valeur(p,y) - valeur(p,x))
fin
finfonctionXI-C. Amélioration de la complexité▲
Même si en première approche, la complexité ne prend en compte que le nombre d'opérations (+, *), en seconde analyse, les multiplications sont beaucoup plus coûteuses que les additions. Cela est pris en compte dans les algorithmes ci-dessous.
XI-C-1. Valeur en un point▲
L'algorithme énoncé au paragraphe précédent effectue 2n multiplications. Le schéma d'Horner d'un polynôme permet d'effectuer n multiplications seulement. Le schéma d'Horner repose sur la propriété suivante :
Soit P(x) un polynôme de degré supérieur à 0 :
kitxmlcodelatexdvpP(x)= \sum_{i=0}^{n} {a_i}{x^i}finkitxmlcodelatexdvpAlors, P(x) s'écrit :
kitxmlcodelatexdvpP(x)= A(x)x + a_0finkitxmlcodelatexdvpOn en déduit le schéma de Horner :
kitxmlcodelatexdvpP(x)= ( ( \dots ( ( a_nx+a_{n-1} )x + a_{n-2} )\ldots )x + a_1 )x + a_0finkitxmlcodelatexdvpfonction valeur(ref p:polynome;val x: réel):réel;
var s:réel;
début
s = p.coeff[p.degre];
pour i allant de p.degre-1 à 0 pas de -1 faire
s = s * x + p.coeff[i]
finpour
retourner(s)
fin
finfonctionXI-D. Multiplication ▲
Une méthode « diviser pour régner » permet d'améliorer cet algorithme. Elle est basée sur l'égalité suivante :
kitxmlcodelatexdvp(ay+b)(cy+d)=acy^2+((a+b)(c+d)-ac-bd)y+bdfinkitxmlcodelatexdvpCette égalité signifie, entre autres, que si deux polynômes sont de degré 1, il suffit de trois multiplications de réels pour obtenir leur produit. Les quantités a, b, c, d, y étant quelconque, celles-ci peuvent être elles-mêmes des polynômes. Soit le polynôme :
kitxmlcodelatexdvpP(x) = \sum_{i=0}^{n} {p_i}{x^i}finkitxmlcodelatexdvpOn peut écrire P(x) sous la forme :
kitxmlcodelatexdvpP(x) = A (x)x^{1+\left \lfloor n/2\right \rfloor} + B(x)finkitxmlcodelatexdvpavec :
kitxmlcodelatexdvpA(x) = \sum _{i=0}^{n-1-\left \lfloor n/2\right \rfloor}{p_i}{x^i}finkitxmlcodelatexdvp kitxmlcodelatexdvpB(x) = \sum _{i=0}^{\left \lfloor n/2\right \rfloor}{p_i}{x^i}finkitxmlcodelatexdvpDe même, on a :
kitxmlcodelatexdvpQ(x) = \sum _{i=0}^{n}{q_i}{x^i}finkitxmlcodelatexdvp kitxmlcodelatexdvpQ(x) = C ( x )x^{1+\left \lfloor n/2\right \rfloor} + D(x)finkitxmlcodelatexdvp kitxmlcodelatexdvpC(x) = \sum _{i=0}^{n-1-\left \lfloor n/2\right \rfloor}{q_i}{x^i}finkitxmlcodelatexdvp kitxmlcodelatexdvpD(x) = \sum _{i=0}^{\left \lfloor n/2\right \rfloor}{q_i}{x^i}finkitxmlcodelatexdvpOn peut donc utiliser l'équation de départ avec : kitxmlcodeinlinelatexdvpa = A(x)finkitxmlcodeinlinelatexdvp, kitxmlcodeinlinelatexdvpb=B(x)finkitxmlcodeinlinelatexdvp, kitxmlcodeinlinelatexdvpc=C(x)finkitxmlcodeinlinelatexdvp, kitxmlcodeinlinelatexdvpd=D(x)finkitxmlcodeinlinelatexdvp et kitxmlcodeinlinelatexdvpy=x^{1+\left \lfloor n/2\right \rfloor}finkitxmlcodeinlinelatexdvp.
De plus, on est amené à calculer des produits de polynômes de degré au plus n/2. Il s'agit donc d'une méthode : « diviser pour régner ». La complexité en nombre de multiplications est alors kitxmlcodeinlinelatexdvpO\left ( n^{\log_{2}3} \right )finkitxmlcodeinlinelatexdvp. Comme on notera ci-dessous, l'algorithme est plus complexe à écrire, mais il est bien plus efficace aussi.
Un prétraitement permet de considérer des polynômes de même degré. Il faut donc une fonction « chapeau ». On définit de plus deux autres fonctions utiles pour le calcul :
- etend : si le degré de kitxmlcodeinlinelatexdvpP(x)finkitxmlcodeinlinelatexdvp est supérieur au degré de kitxmlcodeinlinelatexdvpQ(x)finkitxmlcodeinlinelatexdvp, alors kitxmlcodeinlinelatexdvpQ(x)finkitxmlcodeinlinelatexdvp est modifié de manière à ce que les coefficients manquants soient à zéro, et les degrés des deux polynômes deviennent ainsi égaux ;
- tronque : permet d'initialiser un polynôme avec les premiers termes d'un autre polynôme (calcul de kitxmlcodeinlinelatexdvpB(x)finkitxmlcodeinlinelatexdvp et kitxmlcodeinlinelatexdvpD(x)finkitxmlcodeinlinelatexdvp).
fonction multiplie(ref p,q:polynome):polynome;
var p1,p2:polynome;
fonction etend(ref p:polynome;val n:entier):polynome;
var i:entier;
var r:polynome;
début
r = decale(p,0);
r.degre = n;
pour i de p.degre+1 à n faire
r.coeff[i] = 0;
finpour;
retourner(r);
fin
finfonction
fonction tronque(ref p:polynome;val n:entier)
var c:polynome;
var i:entier;
début
c.degre = n;
pour i de 0 à n faire
c.coeff[i] = p.coeff[i];
finpour;
retourner(c);
fin
finfonction
fonction multirec(ref p,q:polynome)
var a,b,c,d:polynome;
var c0,c1,c2:réel;
var C0,C1,C2:réel;
var m:entier;
début
selon que
cas p.degre == 0
retourner(polynome([p.coeff[0]*q.coeff[0]]))
cas p.degre == 1
c0 = p.coeff[0] * q.coeff[0];
c2 = p.coeff[1] * q.coeff[1];
c1 = (p.coeff[0] + p.coeff[1]) * (q.coeff[0] + q.coeff[1]);
c1 = c1 - c0 - c2;
retourner(polynome([c0,c1,c2]));
autrement
m = partieEntière(p.degre/2);
a = decale(p, -(m+1));
b = tronque(p, m);
c = decale(q, -(m+1));
d = tronque(q, m);
C2 = multirec(a, c);
C0 = multirec(b, d);
C1 = multirec(ajout(a,b), ajout(c,d));
C1 = ajout(C1, ajout(moins(C0), moins(C2)));
C1 = decale(C1, 1+m);
C2 = decale(C2, 2+2*m);
C0 = ajout(C0, ajout(C1,C2));
retourner(C0);
finselonque:
fin
finfonction;
début
si p.degre > q.degre alors
p1 = p;
p2 = etend(q, p.degre);
sinon
p1 = q;
p2 = etend(p, q.degre);
finsi;
retourner(multirec(p1,p2));
fin
finfonctionXII. Listes▲
XII-A. Définition▲
Définition 6.1. Une liste est une table d'association à clé uniqueTable d'association à clé unique telle que :
- le nombre d'éléments de la table (dimension ou taille) soit variable ;
- l'accès aux éléments s'effectue indirectement par le contenu de la clé qui le localise appelée pointeur.
La complexité de l'accès à un élément par son pointeur est kitxmlcodeinlinelatexdvpO(1)finkitxmlcodeinlinelatexdvp. Si p est un pointeur vers un élément alors contenu(p) est l'élément lui-même. Un pointeur qui n'adresse aucun élément a pour valeur NIL. On écrit en EXALGO pour déclarer un pointeur :
nom_pointeur=^type_predefini;On écrit en EXALGO pour déclarer une liste :
type_liste=liste de type_predefini;La manipulation des éléments de la liste dépend des fonctions définies comme s'exécutant en temps kitxmlcodeinlinelatexdvpO(1)finkitxmlcodeinlinelatexdvp.
XII-B. Liste simplement chainée▲
Définition 6.2. Une liste est dite simplement chainée si les opérations suivantes s'effectuent en kitxmlcodeinlinelatexdvpO(1)finkitxmlcodeinlinelatexdvp :
-
accès :
Sélectionnezfonctionpremier(valL :type_liste) :^type_predefini;fonctionsuivant(valL :type_liste;valP :^type_predefini) :^type_predefini;fonctionlisteVide(valL :type_liste) :booléen; - modification :
fonction créer liste(ref L :type_liste) :vide;
fonction insérerAprès(val x :type_prédéfini;
ref L :type_liste;
P :^type_predefini) :vide;
fonction insérerEnTete(val x :type_prédéfini;
ref L :type_liste) :vide;
fonction supprimerAprès(ref L :type_liste;val P :^type_predefini) :vide;
fonction supprimerEnTete(ref L :type_liste) :vide;On écrira en EXALGO listeSC pour préciser qu'il s'agit d'une liste simplement chaînée.
XII-B-1. Test de fin de liste▲
fonction estDernier(ref L :listeSC de type_prédéfini;
ref P :^type_prédéfini) :booléen;
début
retourner(suivant(L,P) == NIL)
fin
finfonctionXII-B-2. Chercher un élément dans une liste▲
fonction chercher(ref L :listeSC de type_prédéfini;
ref E :type_prédéfini) :^type_predefini;
début
var p :^type_prédéfini;
début
si listeVide(L) alors
retourner(NIL)
sinon
p = premier(L);
tant que non(estDernier(L,p)) et (contenu(p) != e) faire
p = suivant(L,p);
fintantque
si (contenu(p) != e) alors
retourner(NIL)
sinon
retourner(p)
finsi
finsi
fin
finfonctionComplexité :
- minimum : kitxmlcodeinlinelatexdvpO ( 1 )finkitxmlcodeinlinelatexdvp ;
- maximum : kitxmlcodeinlinelatexdvpO(n)finkitxmlcodeinlinelatexdvp.
XII-B-3. Trouver le dernier élément▲
fonction trouverDernier(ref L :listeSC de type_prédéfini) :^type_predefini;
var p :^type_prédéfini;
début
si listeVide(L) alors
retourner(NIL)
sinon
p = premier(L);
tant que non(estDernier(L,P)) faire
p = suivant(L,p);
fintantque
retourner(p)
finsi
fin
finfonctionComplexité : kitxmlcodeinlinelatexdvpO(n)finkitxmlcodeinlinelatexdvp.
XII-C. Liste doublement chaînée▲
Définition 6.3. Une liste doublement chaînée est une liste pour laquelle les opérations en temps kitxmlcodeinlinelatexdvpO(1)finkitxmlcodeinlinelatexdvp sont celles des listes simplement chaînées auxquelles on ajoute les fonctions d'accès.
fonction dernier(val L :type_liste) :^type_predefini;fonction précédent(val L :type_liste;
val P :^type_predefini) :^type_predefini;On écrira en EXALGO listeDC pour préciser qu'il s'agit d'une liste doublement chaînée.
XII-C-1. Supprimer un élément▲
fonction supprimer(ref L :listeDC de type_predefini;
val e : type_prédéfini) :booléen;
var p,prec,suiv :^type_prédéfini;
début
p = chercher(L,e);
si p == NIL alors
retourner(FAUX)
sinon
si estPremier(L,p) alors
supprimerEnTete(L)
sinon
prec = précédent(L,p);
supprimerApres(L,prec);
finsi
retourner(VRAI)
finsi
fin
finfonctionComplexité :
- minimum : kitxmlcodeinlinelatexdvpO(1)finkitxmlcodeinlinelatexdvp ;
- maximum : kitxmlcodeinlinelatexdvpO(n)finkitxmlcodeinlinelatexdvp.
XII-D. Quelques algorithmes▲
XII-D-1. Taille▲
fonction taille(val L :type_liste) :entier;
var p :^type_prédéfini;
var t :entier;
début
si listeVide(L) alors
retourner(0)
sinon
retourner(1 + taille( suivant(L, premier(L)) ))
finsi
fin
finfonctionComplexité : kitxmlcodeinlinelatexdvpO(n)finkitxmlcodeinlinelatexdvp.
XII-D-2. Insérer dans une liste triée▲
On suppose la liste triée doublement chaînée dans l'ordre croissant :
fonction insertionTrie(ref L :listeDC de type_prédéfini;
val e : type_prédéfini) :vide;
var p :^type_prédéfini;
début
si listeVide(L) alors
insererEnTete(e,L)
sinon
si contenu(premier(L))>e alors
insererEnTete(e,L)
sinon
insererTrie(suivant(L,premier(L)), e)
finsi
finsi
fin
finfonctionComplexité moyenne : kitxmlcodeinlinelatexdvpO(n)finkitxmlcodeinlinelatexdvp.
XIII. Une implémentation de liste simplement chaînée de caractères▲
On considérera dans tout ce chapitre que l'on a des valeurs qui correspondent à un caractère.
XIII-A. Qu'est-ce qu'implémenter▲
Pour certaines structures de données, l'ensemble des langages de programmation proposent une traduction immédiate. Pour d'autres, il n'existe pas de traduction immédiate. Il faut alors définir explicitement l'algorithme de chacune des primitives.
Exemple - les listes. On doit définir le stockage de la liste, et en fonction de ce stockage comment s'effectue par exemple l'adjonction.
L'implémentation doit respecter la complexité des primitives à part celle d'initialisation (celle-ci ne s'exécutera qu'une fois).
Exemple - les listes. On utilise souvent les fonctions ajouter et supprimer, mais une seule fois creerListe.
XIII-B. Choix de la structure▲
Ici nous allons choisir de ranger les éléments dans un tableau « suffisamment grand ». Chaque élément du tableau est une paire (valeurElement, pointeurSuivant). Un pointeur est la valeur d'un index du tableau ; ainsi l'accès au suivant est en complexité kitxmlcodeinlinelatexdvpO(1)finkitxmlcodeinlinelatexdvp. La zone de stockage peut donc être décrite par :
elementListe = structure
valeur :car;
suivant :entier;
finstructure;
stockListe = tableau[1..tailleStock] d'elementListe;La valeur du pointeur (champ suivant) est donc un entier compris entre 0 et tailleStock. La valeur 0 correspondant à l'absence d'élément suivant. Le premier élément doit être accessible en kitxmlcodeinlinelatexdvpO(1)finkitxmlcodeinlinelatexdvp, il faut donc conserver son index. Si la liste est vide, par convention, l'index du premier sera 0. On peut donc représenter une liste par la structure suivante :
listeSC_Car = structure
tailleStock :entier;
premier :entier;
vListe :stockListe;
finstructure;Le tableau de stockage étant grand, mais pas illimité, il faudra prévoir que l'espace de stockage puisse être saturé.
XIII-C. Primitives d'accès▲
Ces fonctions sont immédiates.
fonction premier(val L :listeSC_Car) :entier;
début
retourner L.premier;
fin;
finfonction
fonction suivant(val L :listeSC_Car,P :entier) :entier;
début
retourner L.vListe[P].suivant;
fin
finfonction
fonction listeVide(val L :listeSC_Car) :booléen;
début
retourner L.premier == 0;
fin
finfonctionXIII-D. Gestion de l'espace de stockage▲
Pour ajouter un élément, il faut pouvoir trouver un élément « libre » dans le tableau. Une première solution consiste à marquer les éléments libres du tableau (par exemple champ suivant de l'élément a pour valeur -1). Dans ce cas, il faudra parcourir le tableau (complexité kitxmlcodeinlinelatexdvpO(n/2)finkitxmlcodeinlinelatexdvp en moyenne). Par suite, la primitive insérerAprès ne sera plus en complexité kitxmlcodeinlinelatexdvpO(1)finkitxmlcodeinlinelatexdvp puisqu'il faudra d'abord trouver un élément libre. Une solution compatible avec la complexité des primitives consiste à gérer cet espace de stockage en constituant la liste des cellules libres. On modifie donc en conséquence la description de listeSC_Car :
listeSC_Car = structure
tailleStock :entier;
premier :entier;
premierLibre :entier;
vListe :stockListe;
finstructure;Par convention, l'espace de stockage sera saturé lorsque l'index premierLibre vaut 0 (la liste des cellules libres est vide). On définit donc la fonction de test :
fonction listeLibreVide(val L :listeSC_Car) :booléen;
début
retourner L.premierLibre == 0;
fin
finfonctionOn définit deux primitives liées à la gestion du stockage :
- mettreCellule : met une cellule en tête d'une liste ;
- prendreCellule : supprime la cellule de tête d'une liste.
Les opérations sont respectivement de type insererEnTete et supprimerEnTete. Préciser la liste sur laquelle s'effectue l'opération revient à préciser le pointeur de tête sur lequel on travaille.
fonction prendreCellule(ref L :listeSC_Car,ref tete :entier) :entier;
var nouv :entier;
début
nouv = tete;
tete = suivant(L,nouv);
retourner nouv;
fin
finfonction
fonction mettreCellule(ref L :listeSC_Car,val P :entier,ref tete :entier) :vide;
début
L.vListe[P].suivant = tete;
tete = P;
fin
finfonctionXIII-E. Primitives de modifications▲
fonction créer_liste(ref L :listeSC_Car;val tailleMax :entier) :vide;
var i :entier;
début
L.tailleStock = tailleMax;
L.premier = 0;
L.premierLibre = 1;
pour i allant de 1 à L.tailleStock-1 faire
L.vListe[i].suivant = i+1;
finpour
L.vListe[tailleStock].suivant = 0;
fin
finfonction
fonction insérerAprès(val x :car; ref L :listeSC_Car; val P :entier) :booléen;
var nouv :entier;
début
si listeLibreVide(L) ou P == 0 alors
retourner faux;
sinon
nouv = prendreCellule(L,L.premierLibre);
L.vListe[nouv].valeur = x;
L.vListe[nouv].suivant = suivant(L,P);
L.vListe[P].suivant = nouv;
retourner vrai;
finsi
fin
finfonction
fonction insérerEnTete(val x :car;ref L :listeSC_Car) :booléen;
var nouv :entier;
début
si listeLibreVide(L) alors
retourner faux;
sinon
nouv = prendreCellule(L,L.premierLibre);
L.vListe[nouv].valeur = x;
mettreCellule(L,nouv, L.premier);
retourner vrai;
finsi
fin
finfonction
fonction supprimerAprès(ref L :listeSC_Car;val P :entier) :booléen;
var suivP :entier;
début
suivP = suivant(L,P);
si P == 0 ou suivP == 0 alors
retourner faux;
sinon
L.vListe[P].suivant = suivant(L,suivP);
mettreCellule(L,suivP, L.premierLibre);
retourner vrai;
finsi
fin
finfonction
fonction supprimerEnTete(ref L :listeSC_Car) :booléen;
var tete :entier;
début
si listeVide(L) alors
retourner faux;
sinon
tete = L.premier;
L.premier = suivant(L,tete);
mettreCellule(L,tete, L.premierLibre);
retourner vrai;
finsi
fin
finfonctionXIV. Remerciements▲
Toute l'équipe de Developpez.com remercie sincèrement M. Delest qui nous a aimablement permis de publier son tutoriel sur notre site. Nous tenons également à remercier zoom61, Siguillaume et Winjerome pour la gabarisation, ainsi que Claude Leloup et Malick SECK pour leur relecture orthographique.